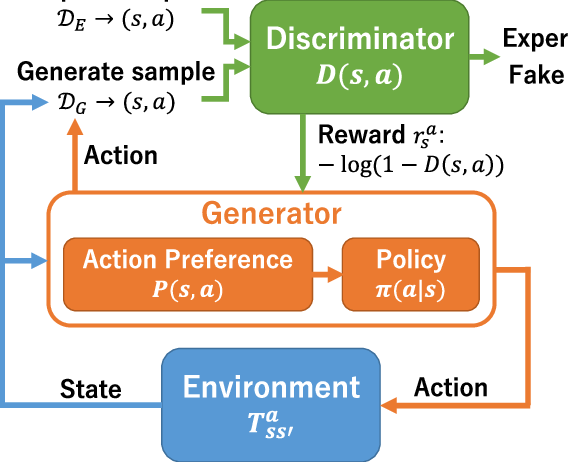
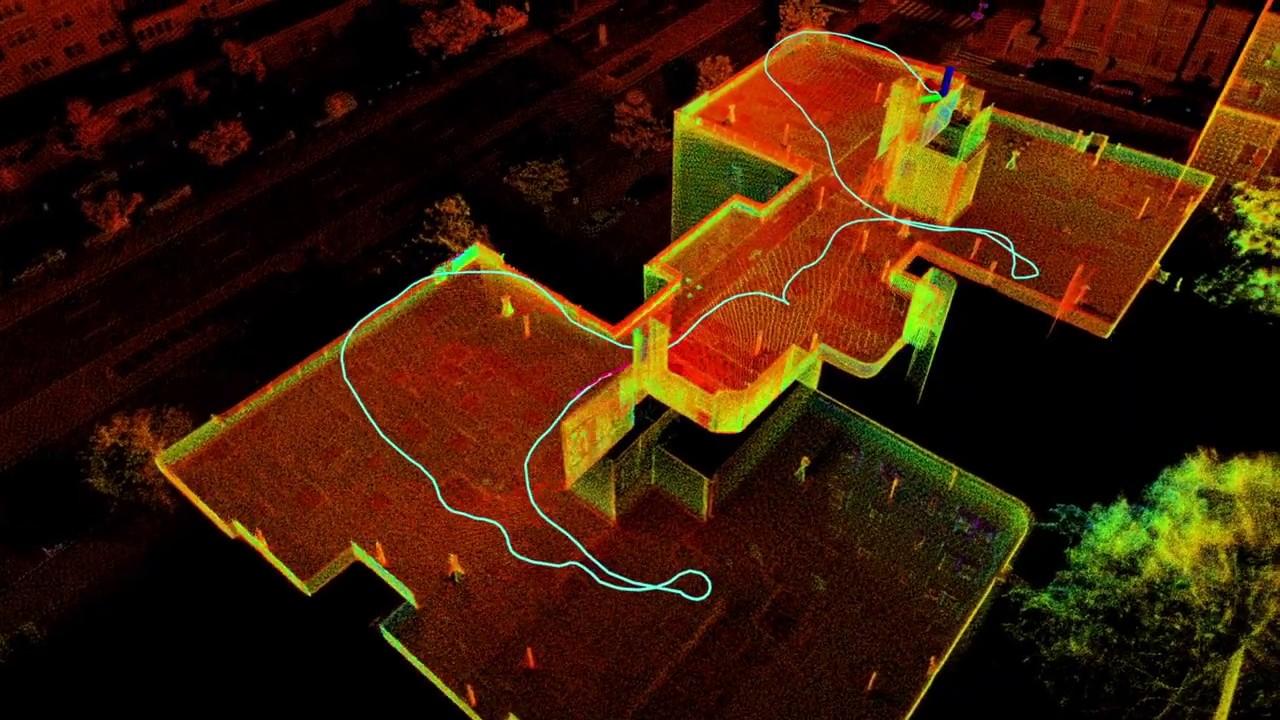
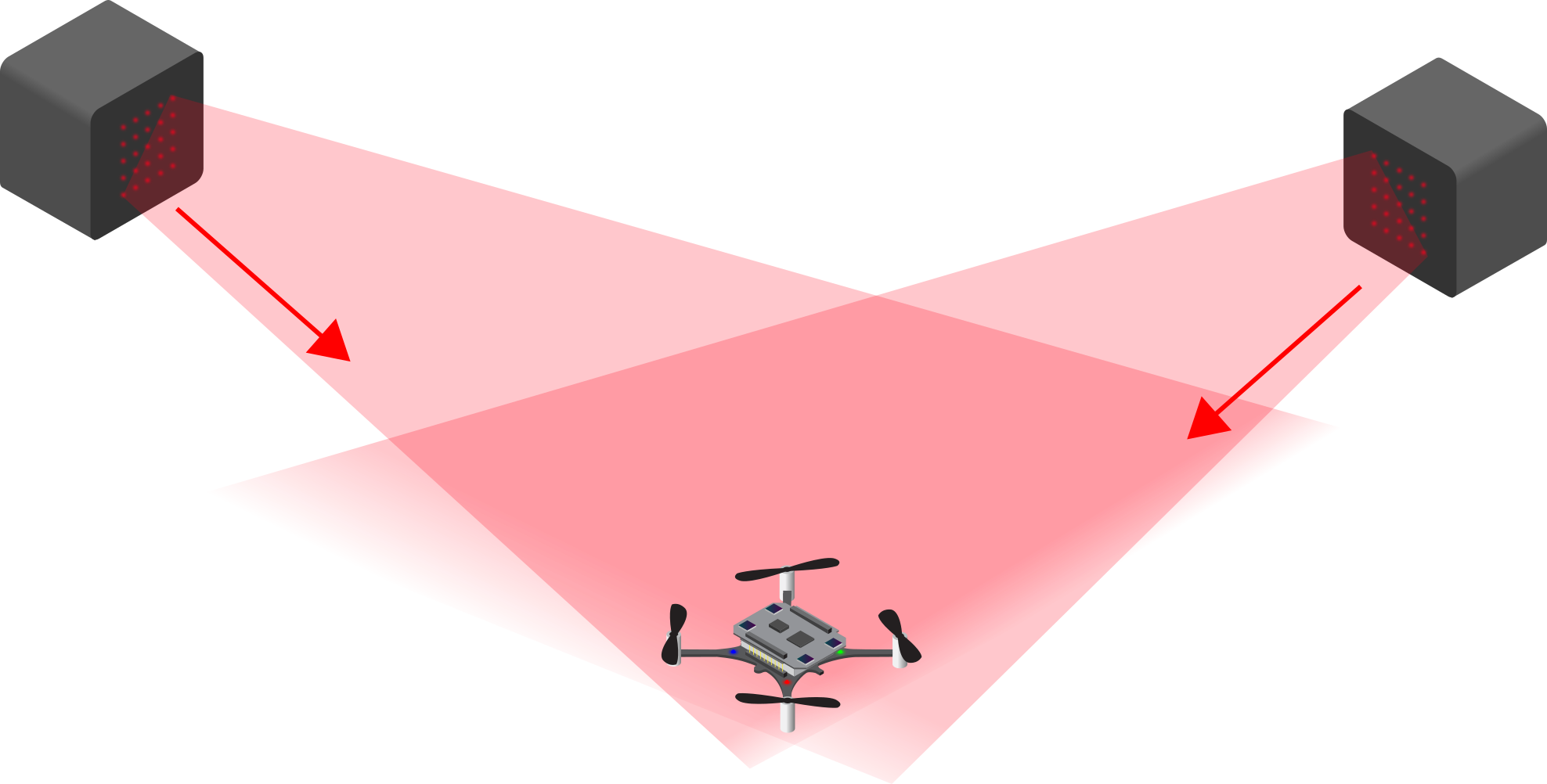
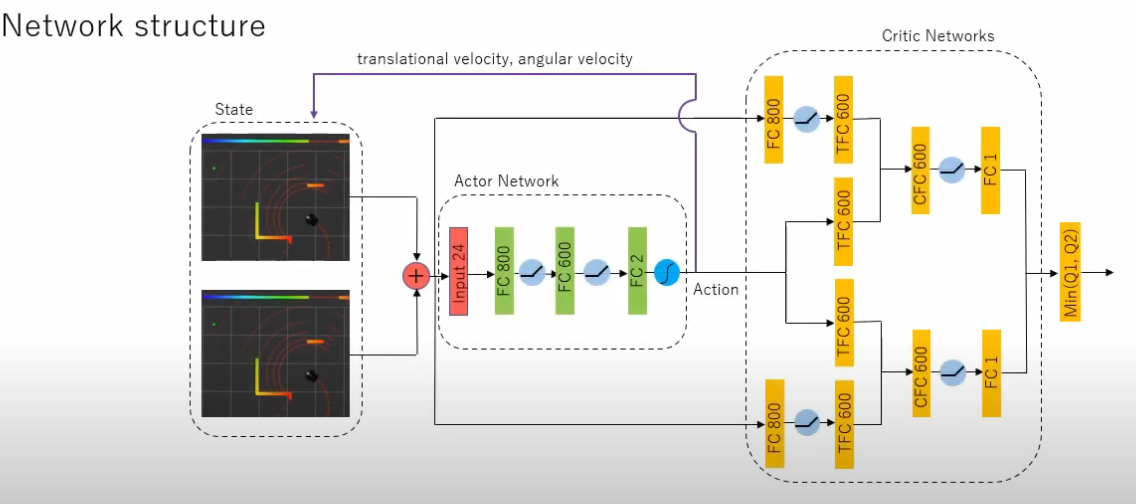
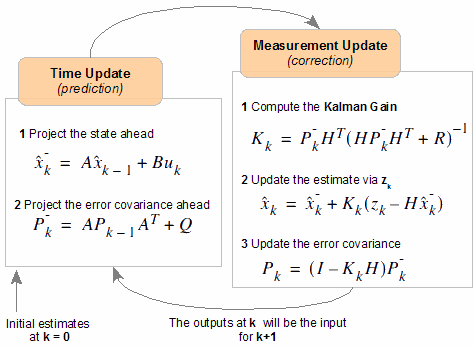
work Follow-Me Robot Using YOLOv11, SAM2, and Visual Servo Control A sophisticated visual servoing system combining YOLOv11 object detection, SAM2 segmentation, and image-based visual servo control for autonomous robot following behavior. GNSS-Denied Visual Localization for UAVs using Satellite Imagery Deep learning-based visual localization system for autonomous UAV navigation in GPS-denied environments Obstacle Avoidance with Imitation Learning This project explores the implementation of obstacle avoidance in autonomous systems using imitation learning. The aim is to train agents to navigate environments while effectively avoiding obstacles. LIO-SAM Gazebo ROS2 This repository contains the implementation of LIO-SAM (Lidar Inertial Odometry via Smoothing and Mapping) integrated with ROS 2 (Robot Operating System 2) for robust and accurate SLAM (Simultaneous Localization and Mapping) applications. YOLOv8 with ROS2 This repository contains the implementation of **YOLOv8** integrated with **ROS 2 (Robot Operating System 2)** for real-time object detection. Crazyflie Flight Tests and Experiments Autonomous flight tests and experiments with Crazyflie 2.1 nano quadcopter, including control system development and real-world flight demonstrations Deep Reinforcement Learning for Mobile Robot Navigation This project implements **Deep Reinforcement Learning (DRL)** for mobile robot navigation using the Twin Delayed Deep Deterministic Policy Gradient (TD3) algorithm. Use of Kalman Filter in Autonomous Vehicles This project explores the implementation of obstacle avoidance in autonomous systems using imitation learning. The aim is to train agents to navigate environments while effectively avoiding obstacles. fun